六部工坊启智MANI机器人
 首页
首页 启智MANI机器人
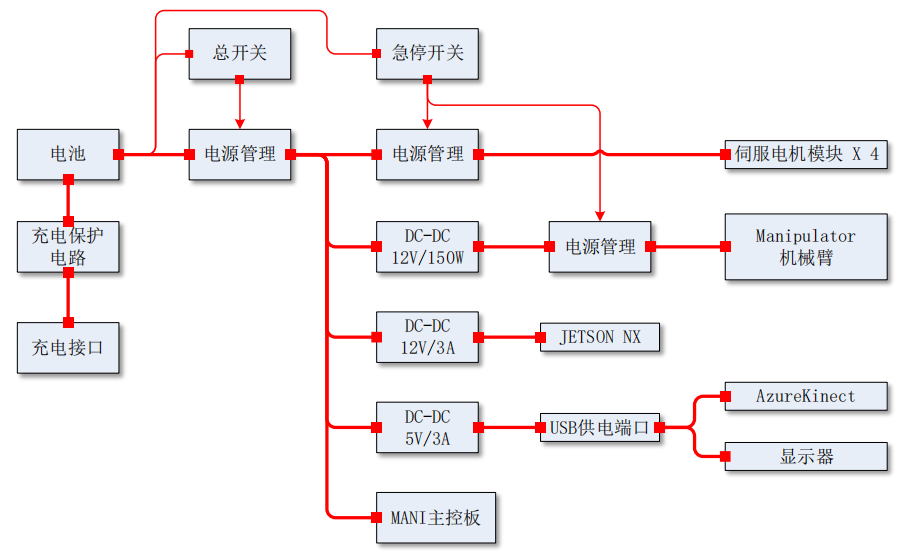
启智MANI机器人启智MANI是一款专门用于移动抓取教学的机器人平台。其拥有麦克纳姆轮全向移动底盘、硬件里程计、激光测距雷达、立体视觉相机、四自由度机械臂等一系列配置。机载计算单元集成384枚GPU硬件加速器,具有极强的三维图形处理和神经网络运算能力。所有实验例程基于ROS机器人操作系统,实验内容覆盖ROS的Navigation、MoveIt、OpenCV、PCL等多个子系统和函数库,完整实现环境建图、定位导航、运动学规划、机器视觉和三维感知等经典技术。除了基于硬件实体的现场实验,还特别设计了基于Gazebo的软件仿真实验,非常适合移动抓取机器人技术的教学和研究。





 机器人硬件概况
机器人硬件概况
 电控系统概述
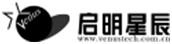
电控系统概述启智 MANI 机器人电控系统组成包含 1 个 Jetson NX 运算单元、1 组电池模块、1 个电源 管理板、1 个底层主控板、4 个伺服电机模块和一条四自由度机械臂。运算单元运行 ROS 操 作系统,扩展出一路 USB-HUB 位于显示屏后方。计算单元通过 USB 与底层主控板相连,底 层主控板通过 RS485 总线连接 4 个伺服电机模块和机械臂。电机模块通过电源管理板为整个系统供电。
通讯链路底盘控制器通过 RS485 总线与底盘伺服电机模块以及机械臂通讯,以 50ms 为周期下发 速度、位置等控制信息,并接收伺服电机反馈的实时位置和绕组电流信息。将系统内伺服电 机模块的反馈数据进行重新封装后,整体以 50ms 周期向运算单元发送。运算单元通过 USB 接口连接主控板,主控板内置 FTDI 接口转换芯片,把 USB 接口转换为 UART 串行接口,通 过 UART 与控制核心 STM32 以 115200 波特率通讯。
启智 MANI 的伺服电机模块内部包括有刷电机、正交编码器、行星齿减速器、驱动控制 板。有刷电机的尾轴直接与正交编码器连接,输出轴与行星齿减速器连接,经减速后输出。 启智伺服电机模块内置驱动控制板以 TI 的 TMS32F28062 数值信号控制器为核心,实现电流 环、速度环、位置环控制。电流环伺服周期为 50us,速度环、位置环伺服周期为 1ms。

软件功能




 教学资源
教学资源启智MANI机器人配备实验指导书,设计了22个课程实验,所有实验均进行了详细实验步骤图文描述,方便用户老师进行课程编排。

产品附赠所有实验的参考课件PPT,助力老师快速开课。 产品附带源码完全开放,支持进一步的扩展开发。
综合实训随着人民生活水平的不断提高,绿色生态、健康环保的生活方式开始逐渐被重视。尤其是垃圾分类处理的政策实施,在减少城市垃圾产出,改善市容街道环境方面取得了巨大成效。

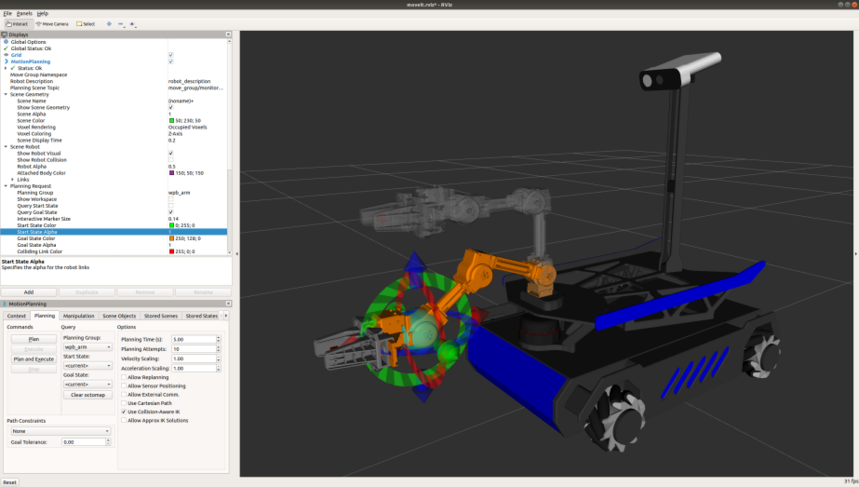
为了将“新基建”的理念贯彻到垃圾分类处理的事业中,进一步提高垃圾分类的质量和效率,我们专门设计了垃圾分拣机器人这么一个综合实训项目。用人工智能、环境建模、定位导航等技术手段进一步提高垃圾分类过程的自动化水平,真正达到环保高效并且能够大范围复制推广的目的,为我国人民的生活质量改善贡献一份努力。该实训项目要求机器人运行在一个模拟公共场所的场景中,自动进行巡逻导航。在不触碰损坏公共设施的前提下,搜集场景中的垃圾物品,并将其投入对应颜色的分类垃圾箱内。

实训场景示意图
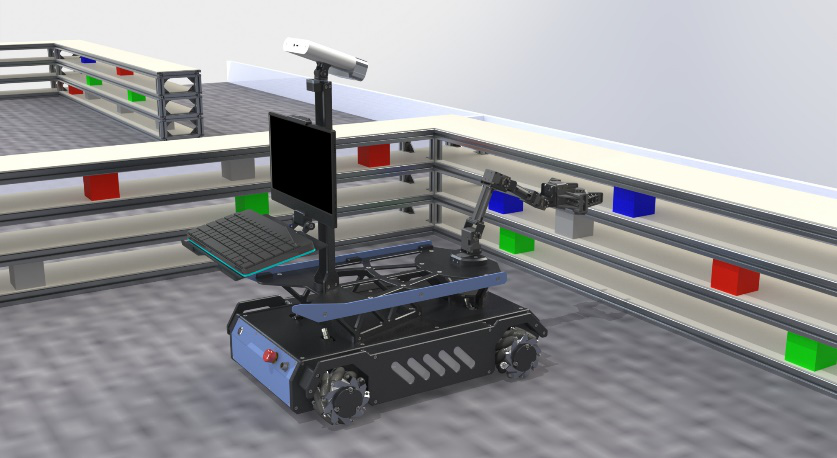
启智MANI机器人搜集环境中的垃圾物品
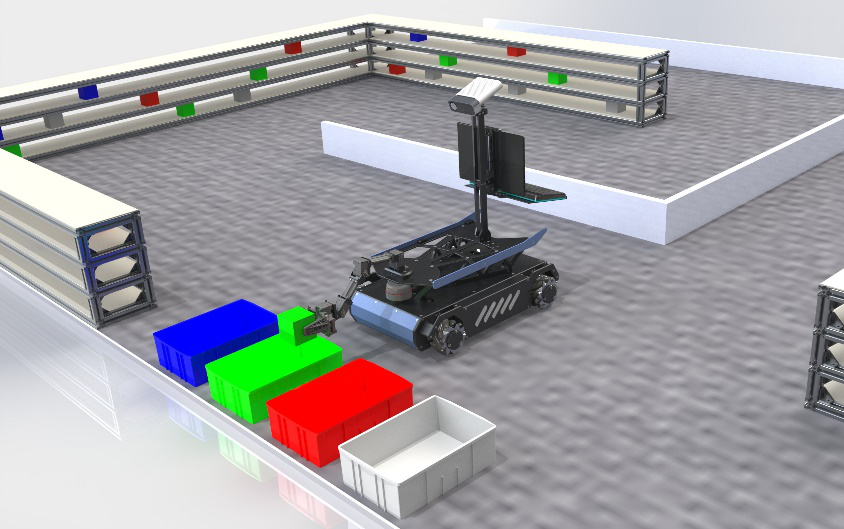
启智MANI机器人将垃圾物品投入相应分类的垃圾箱
在综合实训中,充分运用了启智MANI机器人的建图导航和视觉抓取等多种技能。很好的将机器人课程中的分散的独立知识点进行了融合贯通,让学生真正做到学以致用,学之能用,最大程度的投入到机器人各项技术的学习实践中来,为将来在人工智能行业的就业和学术研究奠定一个坚实的基础。
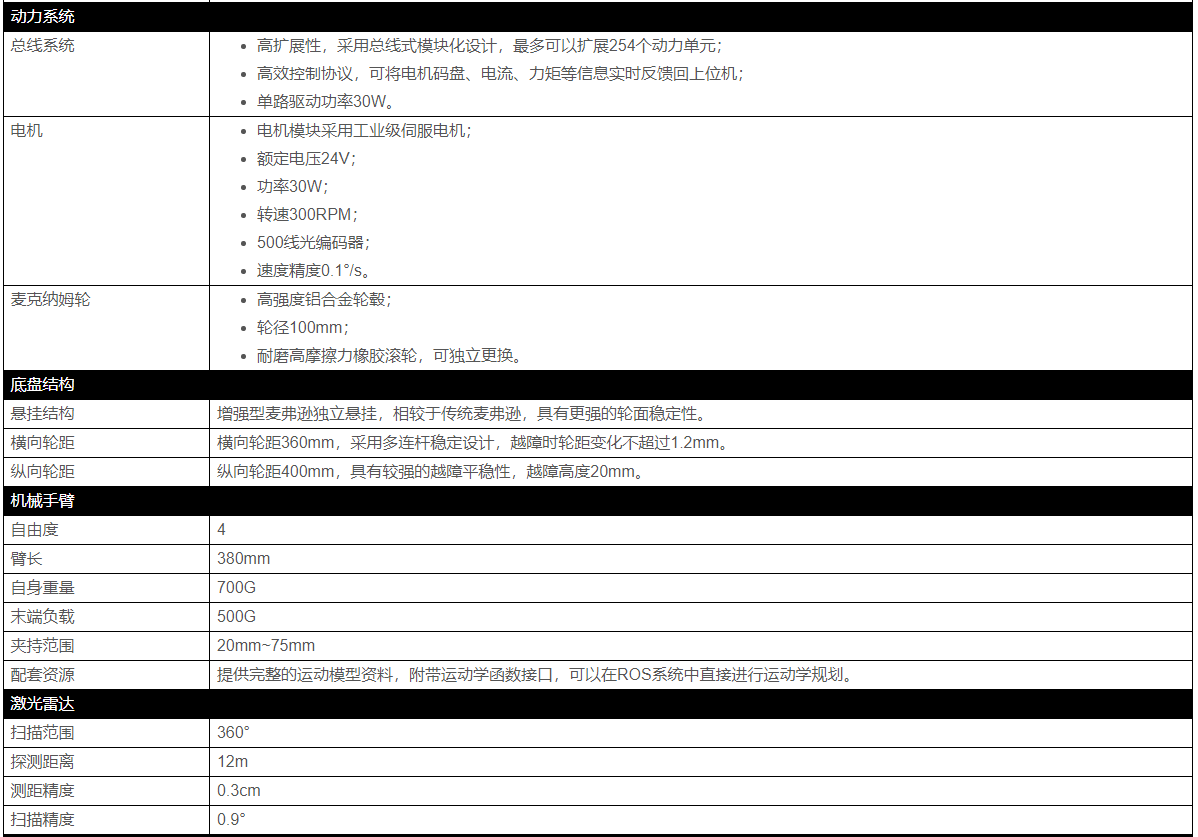
参数列表

产品推荐