







六部工坊启智CV机器人
立即咨询
 首页
首页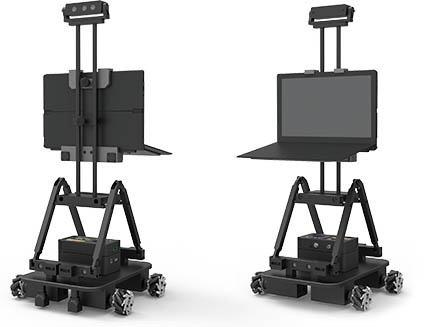
整机参数

产品特性
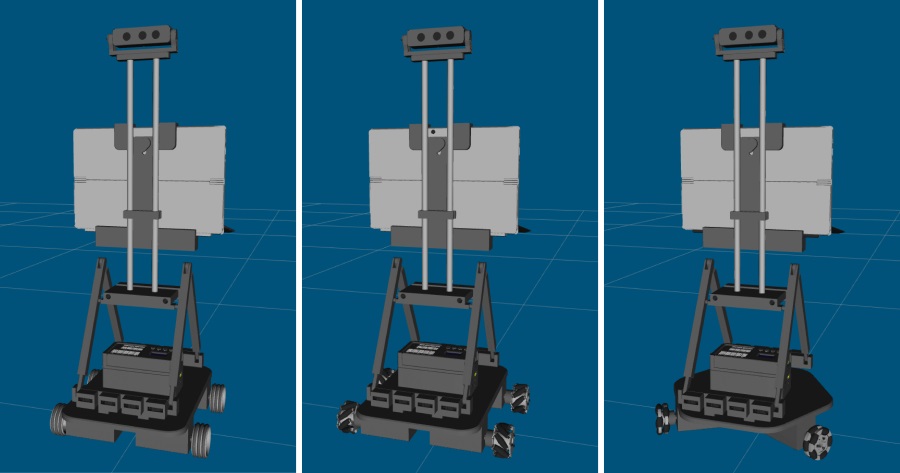
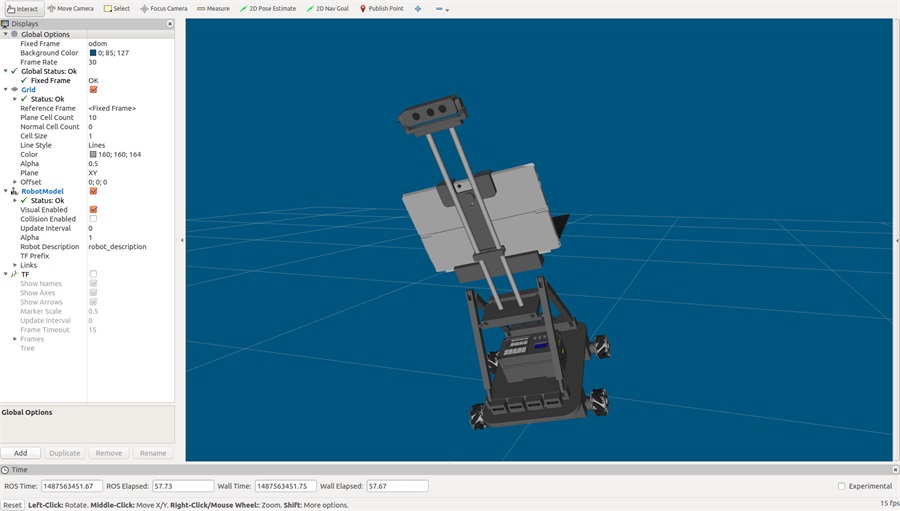
1. URDF模型描述——启智CV机器人运行ROS操作系统,三种底盘构型都具备完整的URDF模型描述,可以
在ROS系统里直接加载和扩展。

2. 电机码盘里程计——启智CV机器人装备了带编码器的直流伺服电机,可以在ROS里获取电机码盘
计数,从而推算出机器人的移动里程信息。
3. IMU姿态传感——启智CV版内置了一枚六轴的IMU单元,可以在ROS中实时获取机器人的
滚转、倾斜和朝向信息,为上层控制算法提供数值依据。
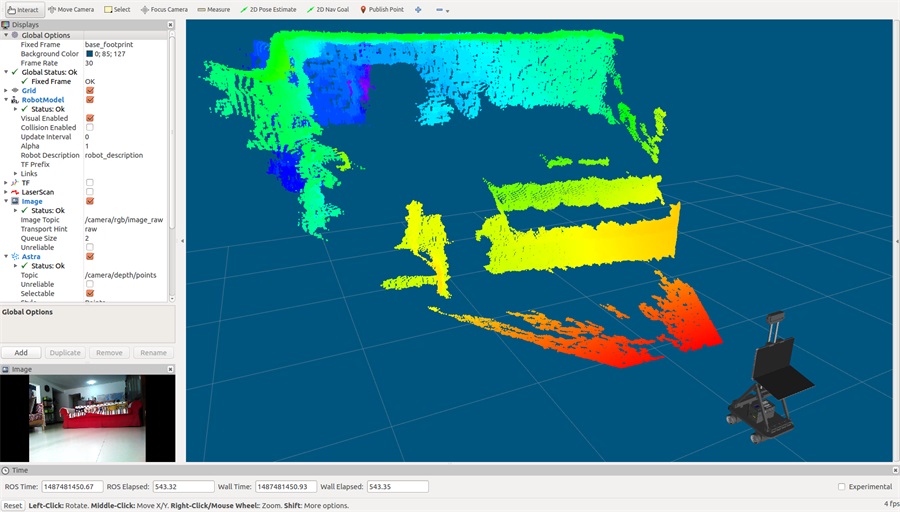
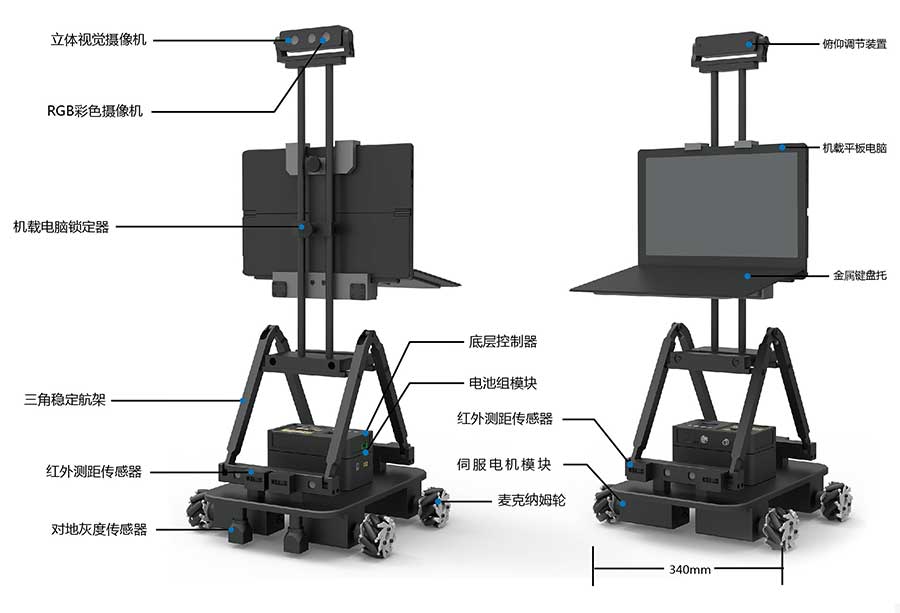
4. 三维立体视觉——启智CV版装备了RGBD立体相机,能够探测视野范围
内的立体信息并实时生成三维点云。
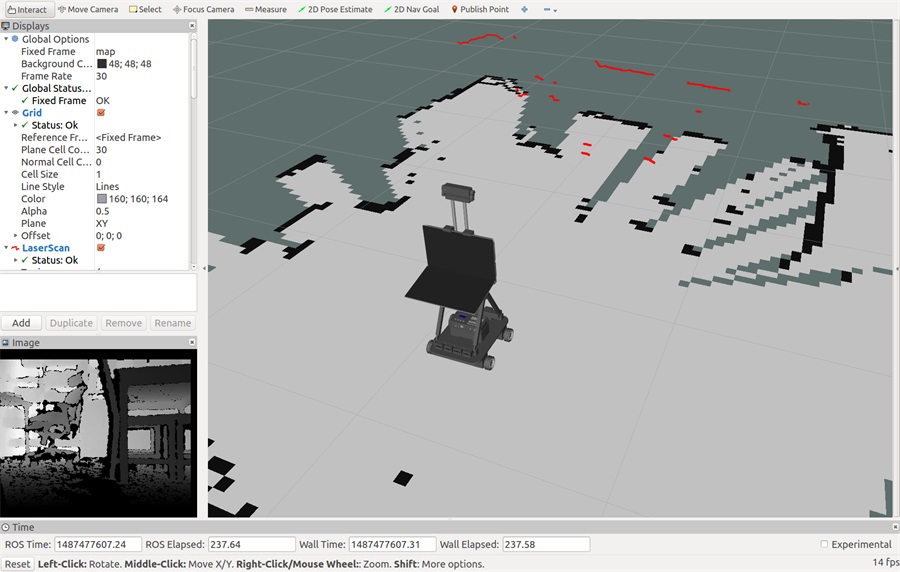
5. SLAM环境建图——启智CV版使用DepthToScan技术将三维立体点云进行
降维SLAM,从而构建出可以进行定位导航的二维平面地图。
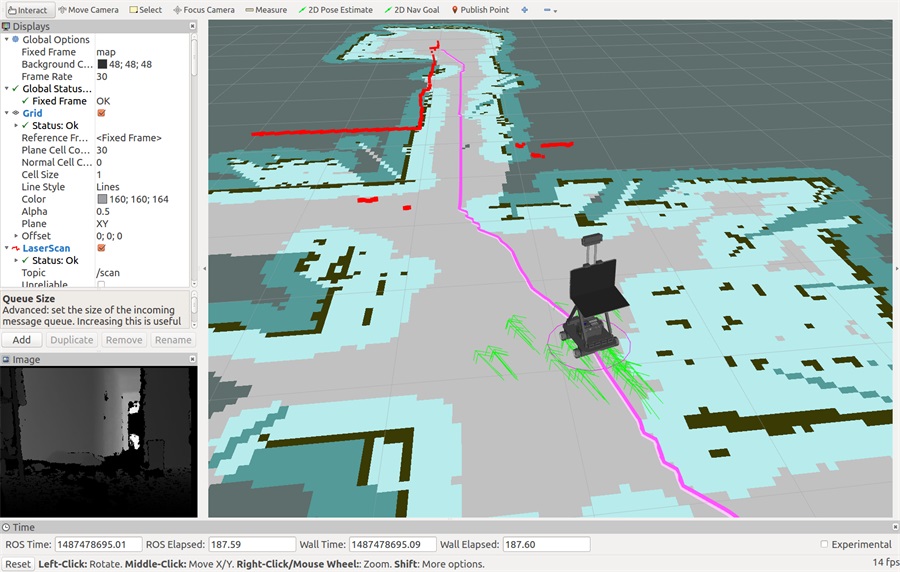
6. 自主定位导航——启智CV版将传感器获取的三维点云信息与电机里程计数据
进行融合,在构建好的地图里进行定位和自主导航。
产品推荐


针对分析当前API数据管理受限于API数据的种类、数据源、格式、接口整合及数据安全合规交换等问题,通过提供多协议数据接入与转换、权限控制、数据脱敏、隐私保护、智能实时预警、安全审计等功能,实现作为用户端与服务端的纽带,核心任务是通过接口统一管控,辅助服务端将能力、服务、数据以接口的形式开放给用户端。解决API管理过程中的标准不一、管理繁琐、传输安全、隐私合规等问题,并快速打通数据孤岛,为数据供需双方提供安全高效的数据交换解决方案。

企业微信安全管理高级功能解决方案,为企业信息安全筑牢坚固防线。涵盖明暗水印、设备管理/IP访问限制、截屏/录屏管控等功能。可有效防止信息泄露,保障企业沟通与数据存储安全,让企业安心使用企业微信开展业务。



