
启智ROS机器人,打造高级机器人算法的理想平台
来源: 云巴巴 2024-03-27 11:11:52
机器人是多专业知识交叉的学科,通常涉及传感器、驱动程序、多机通信、机械结构、算法等,为了更高效地进行机器人的研究和开发,选择一个通用的开发框架非常必要,ROS(Robot Operating System,机器人操作系统)就是流行的框架之一。
 ROS机器人的开发
ROS机器人的开发
其实简单点说,ROS就是一个分布式的通信框架,帮助程序进程之间更方便地通信。
随着技术进步,社会分工加速了机器人行业的发展,机器人产业分工开始走向细致化、多层次化,如今的电机、底盘、激光雷达、摄像头、机械臂等元器件都由不同厂家专门生产和开发。而各个部件的集成就需要一个统一的软件平台,在机器人领域,这个平台就是机器人操作系统ROS。

ROS其实是一个适用于机器人编程的框架,这个框架把原本松散的零部件耦合在了一起,为它们提供了通信架构。ROS虽然叫做操作系统,但并非Windows、Mac那样通常意义的操作系统,它只是连接了操作系统和设计者开发的ROS应用程序。
因此,ROS被作为一个运行在Linux环境上的中间件,在应用程序之间建立了沟通的桥梁。基于ROS环境,机器人的感知、决策、控制算法能够得到更好的组织和运行。
ROS的核心思想就是将机器人的软件功能做成一个个节点,节点之间通过互相发送消息进行沟通。这些节点可以部署在同一台主机上,也可以部署在不同主机上,甚至还可以部署在互联网上。
ROS网络通信机制中的主节点(master)负责对网络中各个节点之间的通信过程进行管理调度,同时提供一个用于配置网络中全局参数的服务。
ROS目前在移动机器人和机械臂领域进行了深入应用,其中移动机器人的应用最为广泛。基于ROS主要实现了移动机器人的仿真建模、多传感器感知、SLAM建图、导航、规划与控制等。
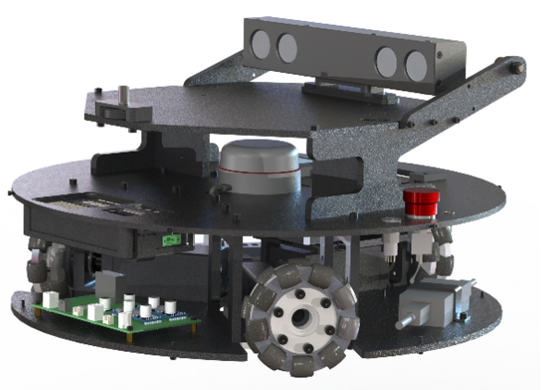
启智ROS机器人
启智ROS机器人是一款为ROS机器人算法开发量身打造的机器人平台,拥有硬件里程计、激光测距雷达、立体视觉相机和语音输入输出阵列等一系列硬件配置,完美适配ROS的TF、Navigation^ Actionlib和Pluginlib子系统,是深入学习ROS和开发验证高级机器人算法的理想平台。
机械结构
便携性设计
启智ROS机器人采用模块化可折叠式设计,整个机构可以很方便的收纳和展开。部署高效,携带方便,非常适合异地参赛使用。

底盘
启智ROS机器人采用了三轮全向式移动底盘,相比传统的双轮差动底盘,拥有更多的自由度。全向底盘可以在不改变朝向的情况下往水平面上的任何方向移动,这在进行目标跟踪和运动避障时,可以减少机体位置调整的步骤,减少调节时间,提高执行效率。
主体
启智ROS机器人的主体机身为一个铝合金层叠结构,可以方便的进行各类传感器的搭载和安装,为机器人平台的应用扩展预留了极大的空间。
手爪(选配)
启智ROS机器人可以扩展安装升降机械臂。该机械臂分为折叠和伸展两种状态,不使用时折叠收纳,避免磕碰。
需要使用时向前伸展,进行物品抓取。伸展状态时,机械臂具备升降功能,可以在一个连续高度范围内动态调整手爪高度。结合机器人头部立体相机的点云分析,完成三维空间内的物品分割、识别和抓取等一系列任务。
头部(图为手爪)
启智ROS机器人的头部安装了一台RGB-D立体相机,并按照需要进行安装角度的调节。立体相机可同时获得所处环境的彩色平面图像信息和三维点云数据,可以很方便的识别和定位视野范围内的目标物体。

传感器
激光雷达
启智ROS机器人的底盘上安装了一枚红外激光雷达,该雷达的扫描角度为360°,能够很高效的检测出周围的障碍物分布,并可以通过SLAM技术进行机器人的自身定位,为机器人的移动导航提供数据基础。
姿态测量系统
启智ROS机器人的底盘内置了一个三轴姿态测量系统,可以实时检测机体的朝向、翻滚及俯仰角度。为机器人的导航及行进提供重要数据,并让机器人在运动过程中发现倾倒风险,及时采取紧急措施。
立体相机
启智ROS机器人的头部安装了新一代的RGB-D立体相机,可通过机械旋钮调节其视角,以便对准需要进行视觉识别的目标区域。立体相机可以输出RGB彩色视频流和Depth深度数据三维点云,借助OpenCV和PCL等开源图像库,可以对目标物进行准确识别和定位,以便进行后续的任务。
软件特性
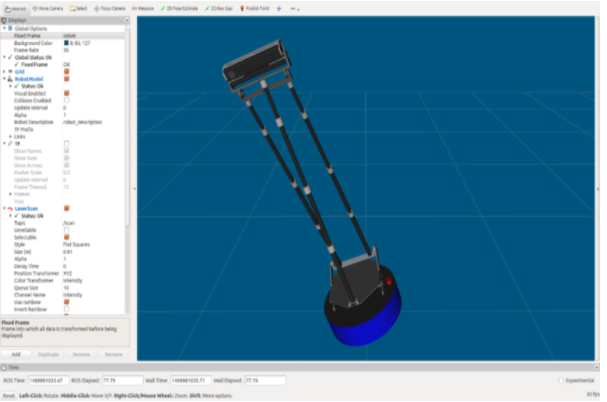
1、URDF模型描述
启智ROS机器人具备完整的URDF模型描述,可以在ROS系统里直接加载。
2、电脑码盘里程计
启智ROS版装备了带编码器的直流伺服电机,可以在ROS里接收电机码盘计数,从而推算出机器人的移动里程信息。
3、IMU姿态传感
启智ROS机器人置了一枚六轴的IMU单元,可以实时获取机器人的滚转、倾斜和朝向信息,为机器人的上层控制算法提供数值依据。
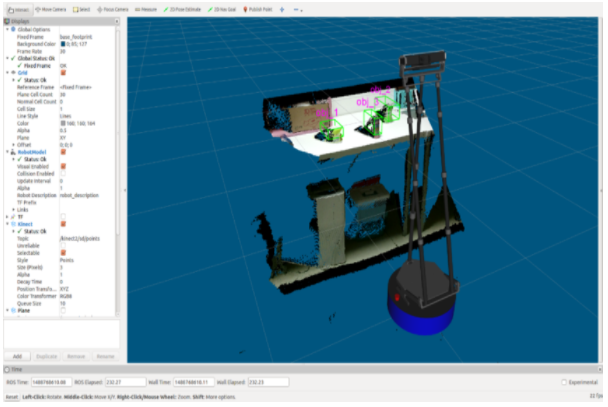
4、三维立体视觉
启智ROS机器人采用第三代的TOF立体相机,探测距离达到8米,最大视角70°,适用于对室内环境的三维模型重构。
5、SLAM环境建图
启智ROS机器人装备了第二代360°激光雷达,可以实时扫描机器人周围的障碍物分布状况,借助HectorSLAM和GMapping算法,创建环境地图。
6、自主定位导航
启智ROS机器人将激光雷达扫描的距离信息与电机里程计数据进行融合,使用AMCL方法进行地图定位,结合ROS的move_base进行自主导航。
7、动态目标跟随
启智ROS机器人可以快速锁定一个跟踪目标,保持指定距离,一直尾随目标物进行移动。
8、物品检测
启智ROS机器人通过立体相机获得三维点云,对点云中的物品进行检测、匹配和轮廓辨识,计算每个物品的外形尺寸和三维空间坐标。
9、人脸检测
启智ROS机器人支持Haar特征级联分类器,结合机器人头部的高分辨率摄像机,对环境中的人脸特征进行检测,并根据立体相机采集的点云,计算其三维空间坐标。
10、语音识别
启智ROS机器人使用科大讯飞语音识别和语音合成引擎,完美支持中文和英文语音交互模式。同时提供多种方言优化识别和多样化的音色语音合成,方便个性化定制。
11、GAZEBO仿真系统
启智ROS机器人的模型文件具备完整的物理惯量和传感器配置描述,可以在GAZEBO仿真环境里直接加载。附赠的源码资源中,包含多个物理仿真场景,可以脱离机器人实体,在纯软件环境中进行算法模拟。
 更多产品了解
更多产品了解
欢迎扫码加入云巴巴企业数字化交流服务群
产品交流、问题咨询、专业测评
都在这里!

为你推荐

防灾减灾网上模拟体验馆与虚拟技术的关系
新的世纪里,科学技术会更快的发展,使我们人类生活更加方便,时时刻刻的为我们服务,所以,我们要好好的学习,去了解企业虚拟技术,日后更好的服务社会。虚拟技术被应用与很多领域,本文,主要说一下防灾减灾网上模拟体验馆与虚拟技术的关系。 防灾减灾网上模拟体验馆是一2022-11-21 10:39:05

腾讯云618特惠人工智能专场,AI换脸百元万次!
2021年腾讯云618特惠活动最热门的云产品除了云主机、云数据库之外还有人工智能系列的云产品,大多是SaaS型云产品并且能够提供SDK开发包供二次开发使用。2022-11-24 14:04:28

人脸识别领域又一次革新——腾讯云人脸核身
腾讯云人脸进行识别技术服务在多个国家国际社会公开教学竞赛中刷新世界纪录,人脸数据比对在2017年的 LFW 测评中准确度高达99.80%;人脸信息搜索在 MegaFace 竞赛百万企业规模中首选识别率达83.29%,排名中国第一,识别系统准确率业界领先。2022-11-23 15:55:53

浅谈面部图像识别技术之热感相机
另一种获取面部识别输入数据的方式是使用热感相机,通过这种方法,相机只能检测头部的形状,而忽略了眼镜、帽子或化妆品等目标配件。与传统相机不同,热感相机即使在光线不足和夜间条件下也能捕捉面部图像,无需使用闪光灯和曝光相机位置。 然而,使用热感图像进行人脸识别2022-11-22 16:07:22

虹膜识别技术,经过百年发展更能方便我们
虹膜识别技术出现的时间并不能说太晚,如果要追寻虹膜识别技术这一路的发展经历以及过程的话可以从19世纪80年代开始追溯,在我们需要进行身份认证的很多场景下虹膜识别从多个方面提升了我们周围的安全系数。和其他识别方式不同的是虹膜识别技术减少了我们与识别仪器之间不2022-11-24 10:30:35
严选云产品







领先的企业数字化服务平台
客服电话:400-0972-788


评论列表