


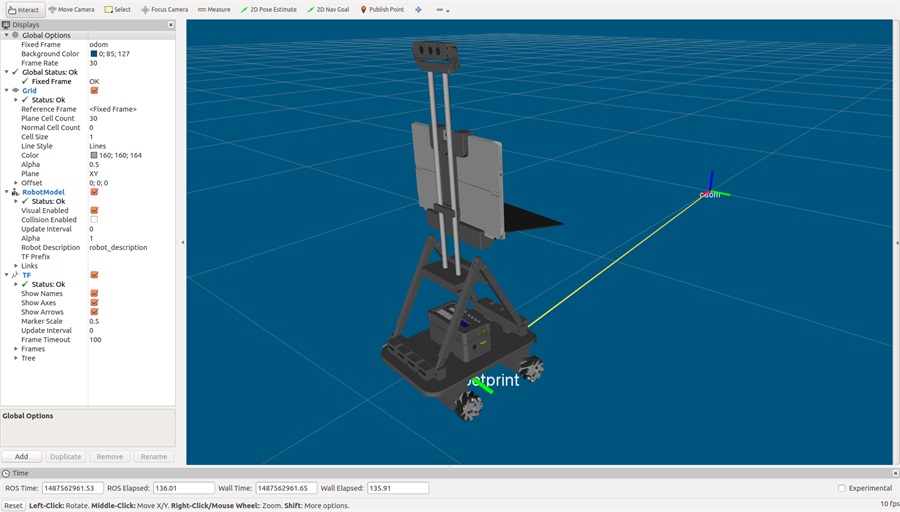
1. URDF模型描述——启智CV机器人运行ROS操作系统,三种底盘构型都具备完整的URDF模型描述,可以
在ROS系统里直接加载和扩展。
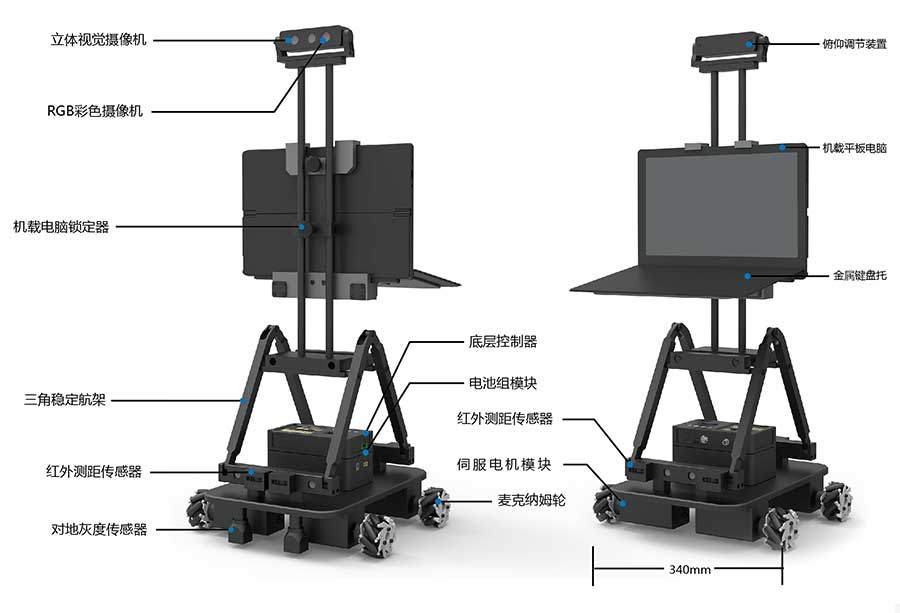
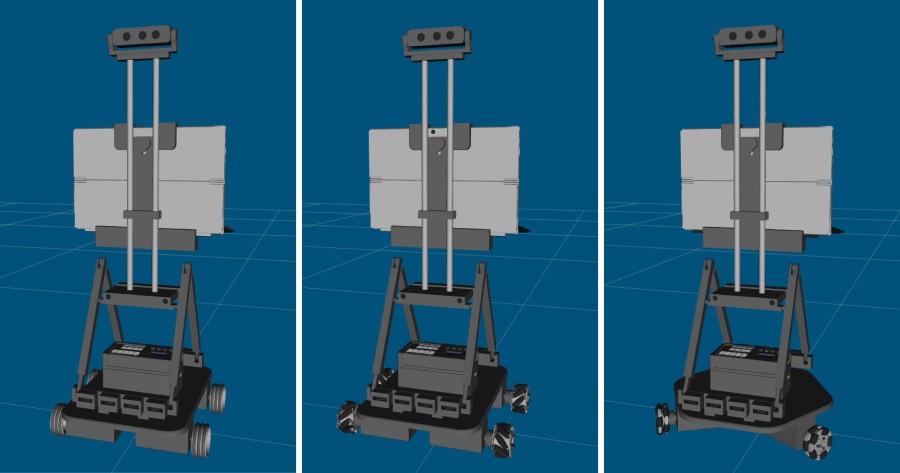
2. 电机码盘里程计——启智CV机器人装备了带编码器的直流伺服电机,可以在ROS里获取电机码盘
计数,从而推算出机器人的移动里程信息。

3. IMU姿态传感——启智CV版内置了一枚六轴的IMU单元,可以在ROS中实时获取机器人的
滚转、倾斜和朝向信息,为上层控制算法提供数值依据。
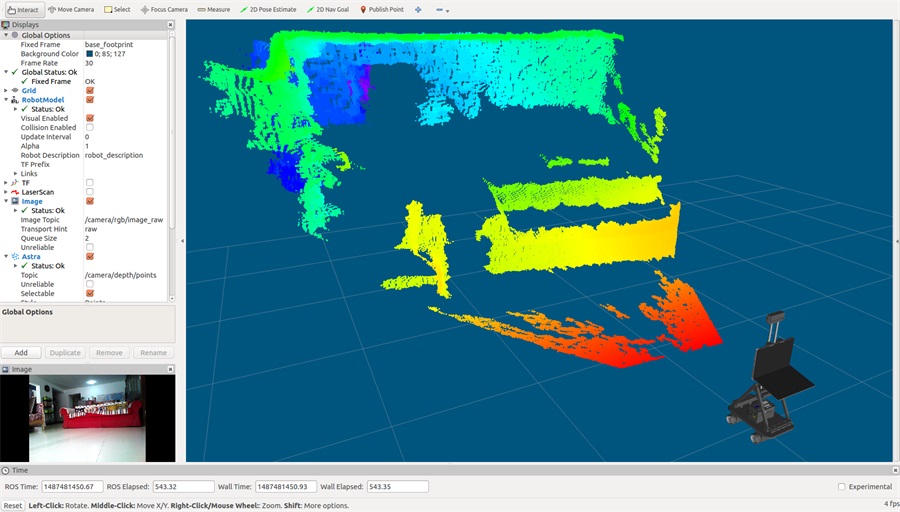
4. 三维立体视觉——启智CV版装备了RGBD立体相机,能够探测视野范围
内的立体信息并实时生成三维点云。
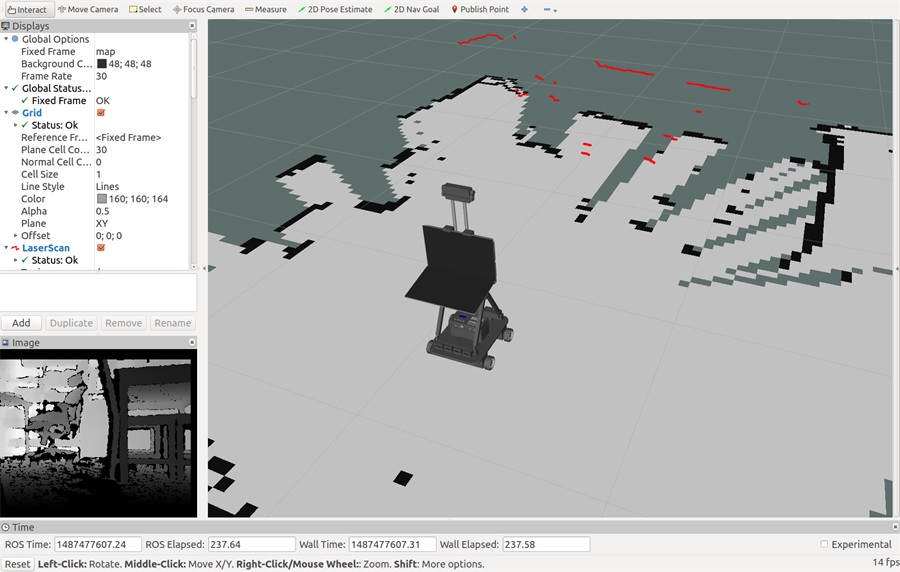
5. SLAM环境建图——启智CV版使用DepthToScan技术将三维立体点云进行
降维SLAM,从而构建出可以进行定位导航的二维平面地图。
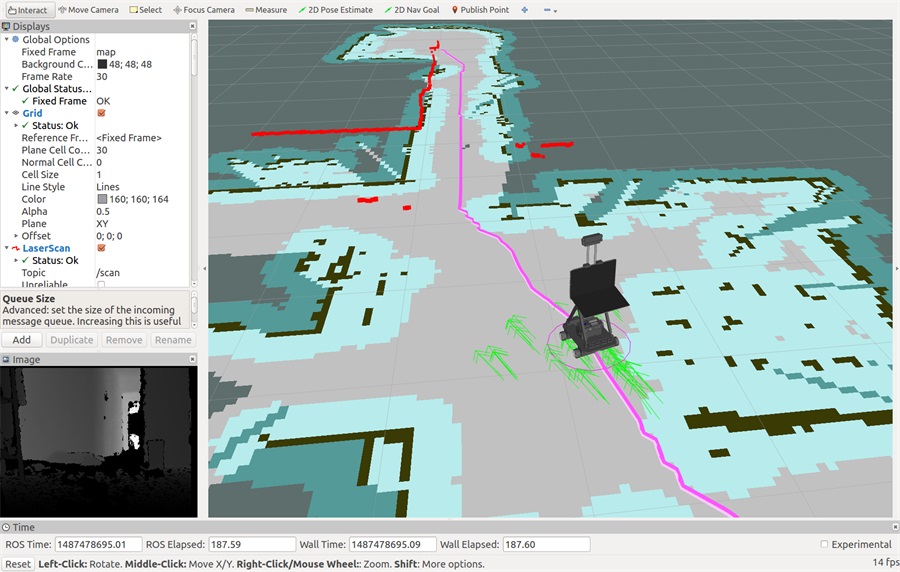
6. 自主定位导航——启智CV版将传感器获取的三维点云信息与电机里程计数据
进行融合,在构建好的地图里进行定位和自主导航。
腾讯云智能结构化文字识别,适应任意版式,提高数据可用性,根据客户传参,智能调整结构化文本内容。一个产品满足附加需求,增加客户粘性,为客户的非标准产品需求形成轻量级OCR解决方案,低成本、低门槛、短周期的方式快速接入。
适应任意版式,提高数据可用性
根据客户传参,智能调整结构化文本内容
一个产品满足附加需求,增加客户粘性
低成本、低门槛、短周期的方式快速接入
“灵泷”快速三维人体扫描系统,针对当前数字人制作周期长,自动化程度低,严重依赖人员经验等问题,搭建的人体全身采集系统。通过摄像机阵列扫描真实演员,突破图像阵列采集、表情自动绑定、语义控制器自动关联等关键技术,实现一键拍摄快速重建高逼真数字人。
表情采集
阵列采集
自动绑定
自动关联











领先的企业数字化服务平台
客服电话:400-0972-788

